Set up Simrad EK-80 software to relay GPS and Depth to Andes
Pre-requirements
- Make sure Andes server is on the same network as the EK80. If necessary, you might need to install a second network interface card on the Andes server.
- The second nic can be configured in /etc/netplan/*.yaml:
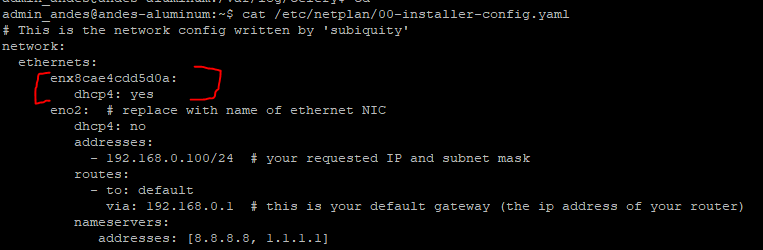
- You will need to know the IP address of the Andes server on the acoustic network (
$ip a)
EK80 software configuration
Reference manuals for the EK80 are readily accessible on the open web.
Replay mode
- It is important to NOT use the sonar in normal mode or ping when at port, this can damage the system.
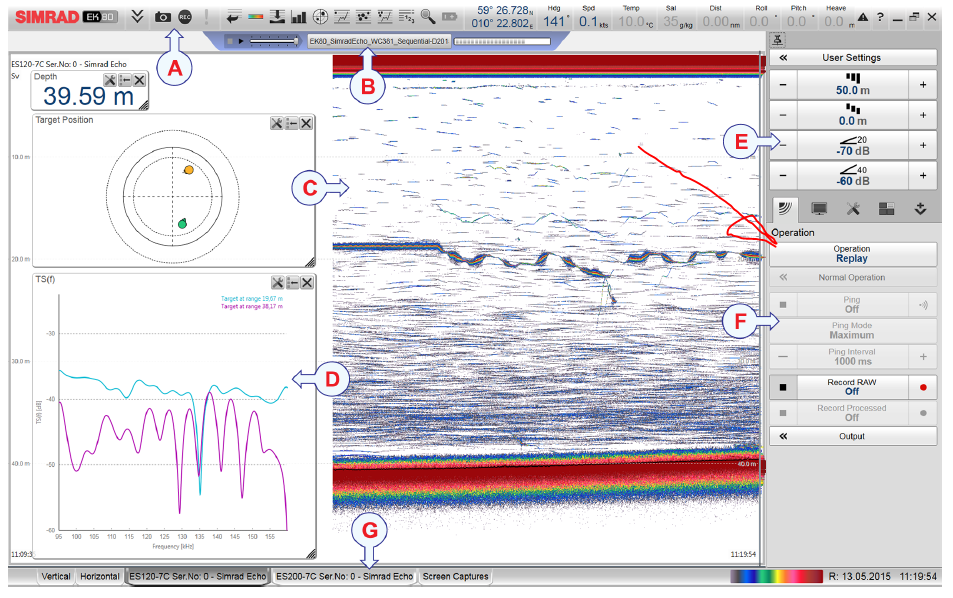
- To test the system in port, replay mode can be used. To start replay mode, click on operation, and select replay and any available *.raw file:
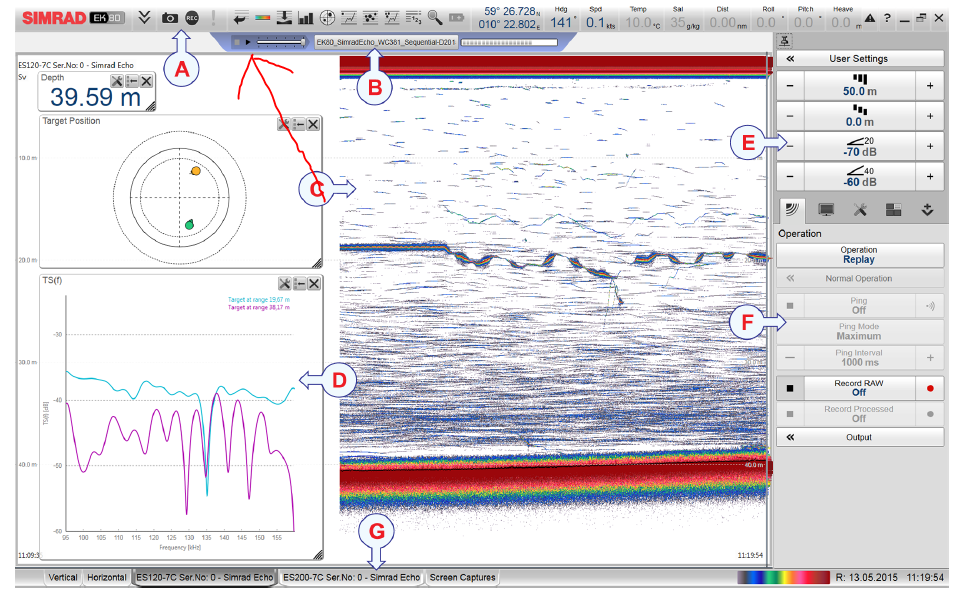
- Once a replay file is chosen, playback can be started using the play button near the top of the screen:
EK80 configuration for Andes
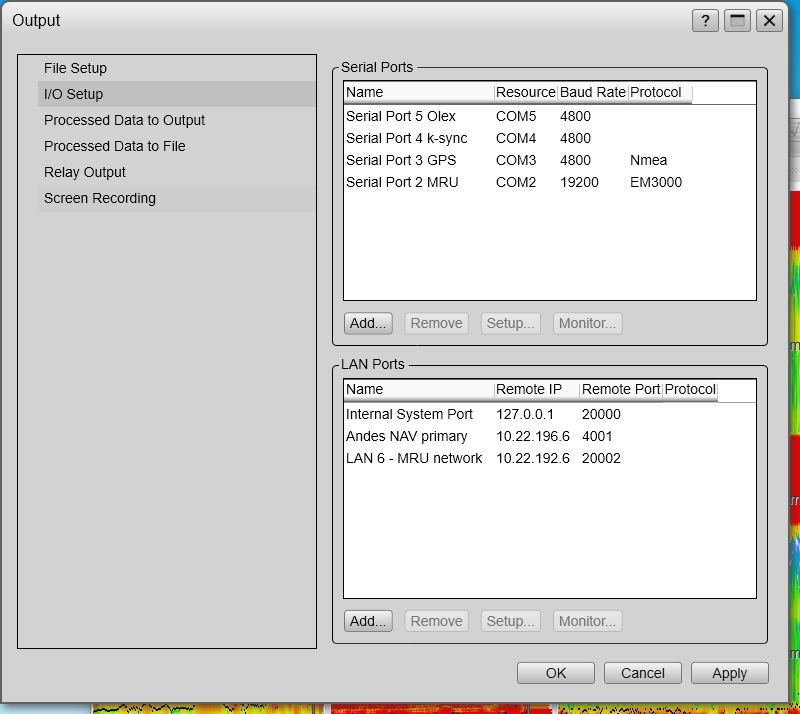
Create a new LAN port
To forward data from EK80 to Andes, we have to configure a new LAN port on the EK80 which corresponds to the UDP port on which Andes is listening for NMEA data.
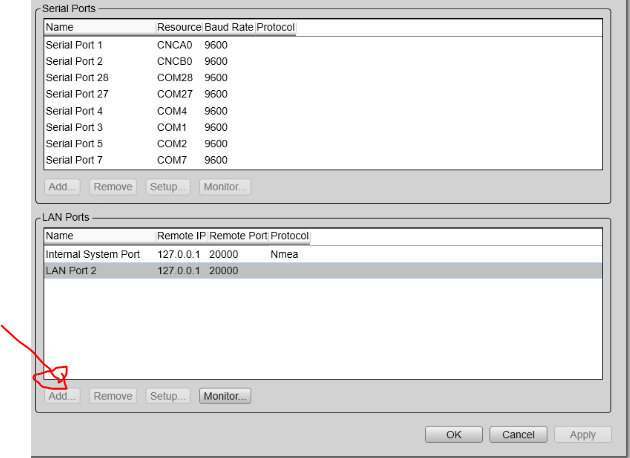
first open the Output window and enter the I/O Setup tab.
Click on the Add button at the bottom of the second window (“LAN Ports”).
NOTE: The system may need to be set to the “inactive” operation mode in order to edit some of these fields.
In the new LAN port form:
- The local IP should be the IP address and should be left blank.
- The local port should be left as the prefilled value (e.g. 20002).
- The remote IP should be the IP address of the andes server (e.g., 10.22.196.4)
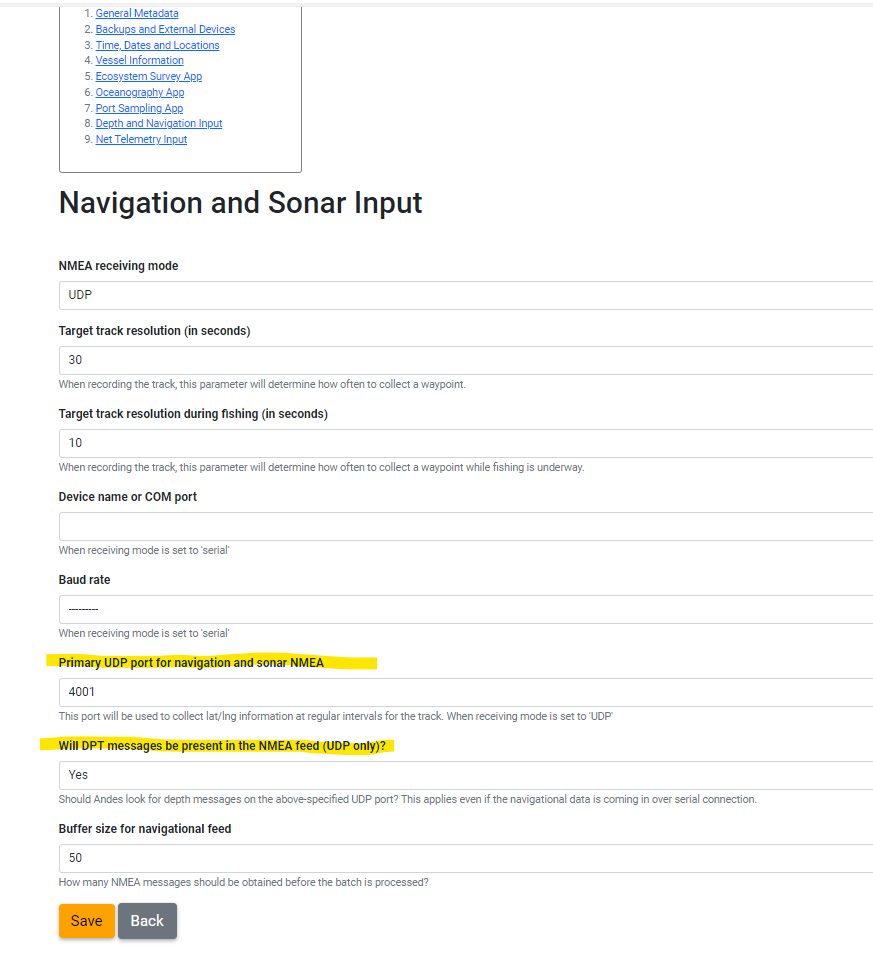
- The remote port should be the UDP port identified in the Andes configuration mission (e.g., 4001)
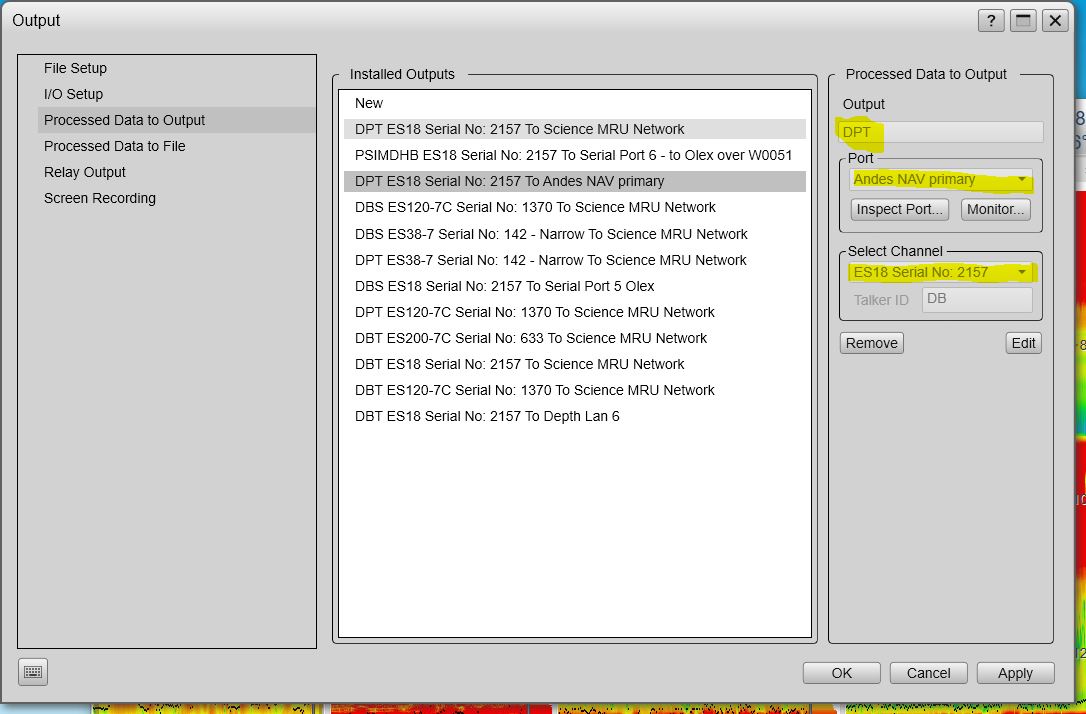
Sonar
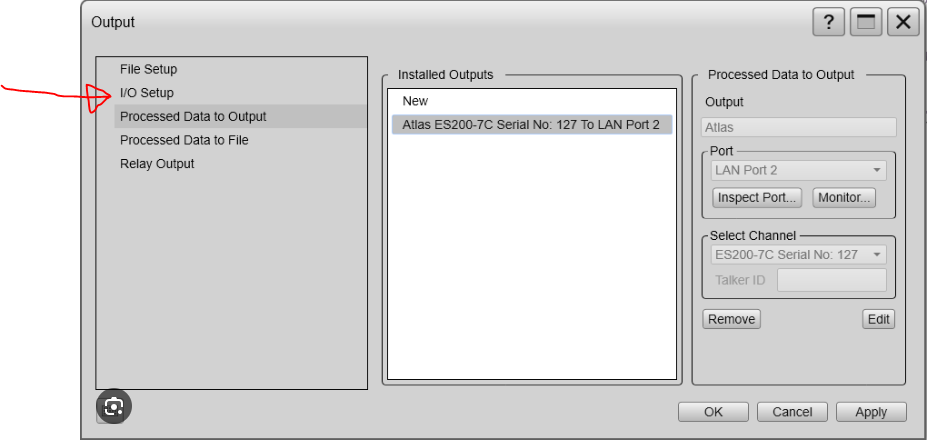
Go to the Processed Data to Output tab and add a new output.
The output should be DPT, the port should be the new LAN port created above.
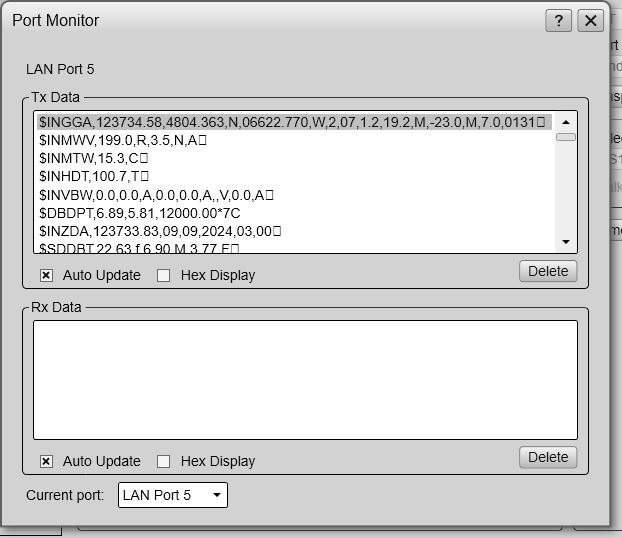
The monitor button in the EK80 software can be used to verify that data is being transmitted.
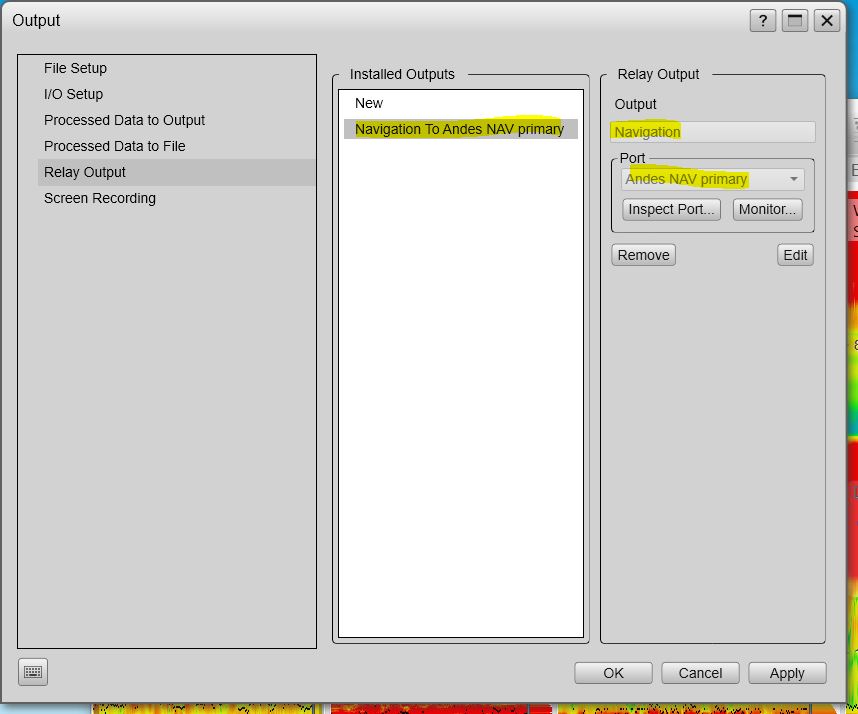
Navigation
The EK80 can be used to relay the vessel’s navigation feed to Andes via UDP.
To configure this, click on the Relay Output tab in the Output menu and click new.
The output of the new output should be Navigation and the port should be the new LAN port created above.
You can use the monitor button to see what is being relayed to the specified LAN port
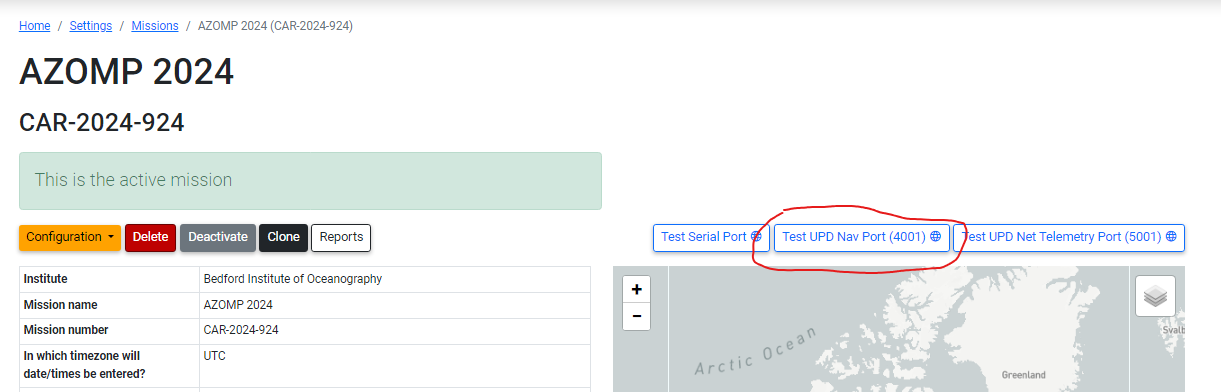
Test the ports
At this point depth data should be available on the andes server.
This can be verified by using the test port link in the Andes mission detail page
or this can be done via the command line (on the Andes server) with the following command:
$netcat -u -l -p 4001
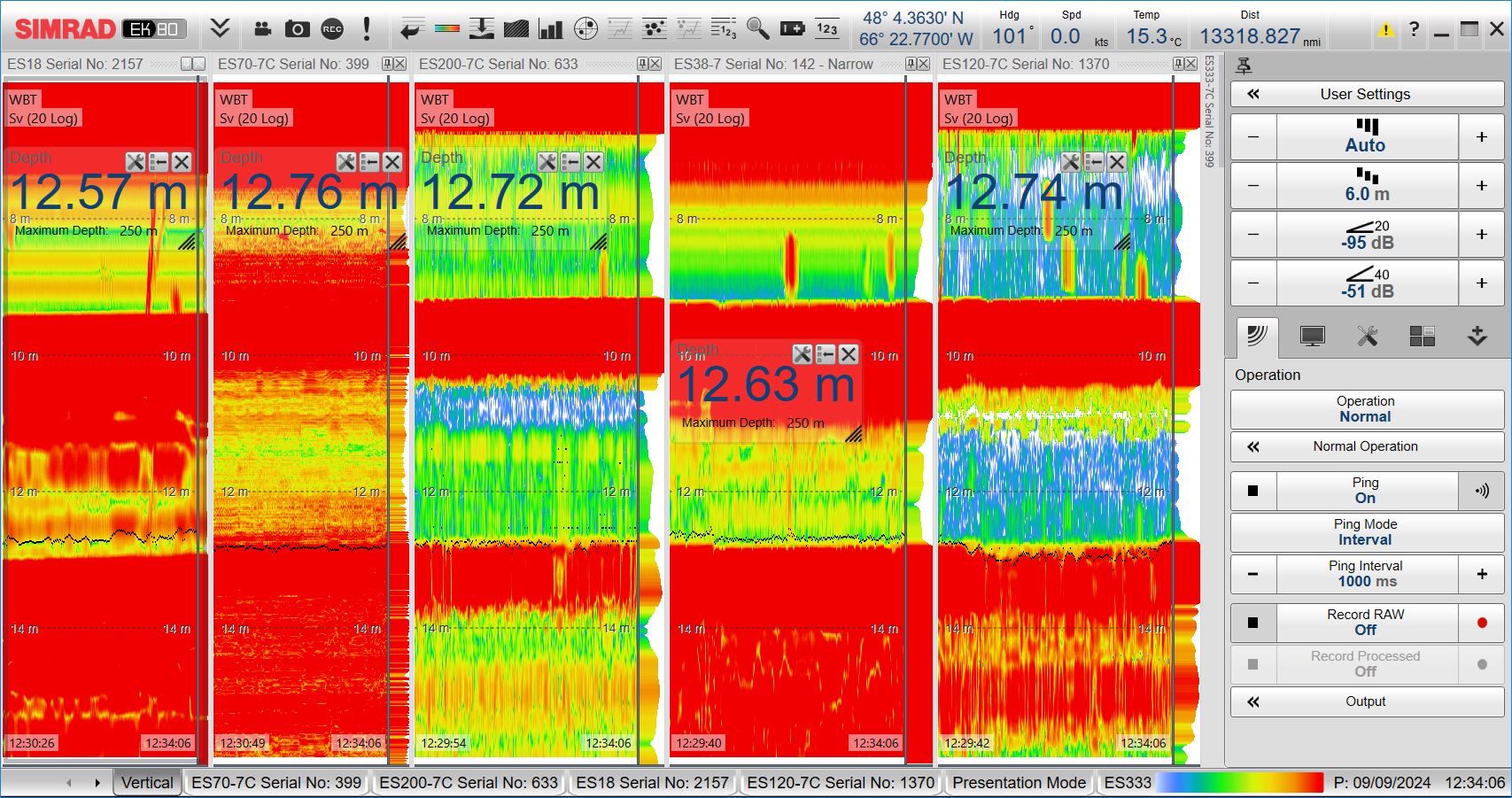
These files need to be annotated, but here are some more screenshot from EK80 on the Cartier
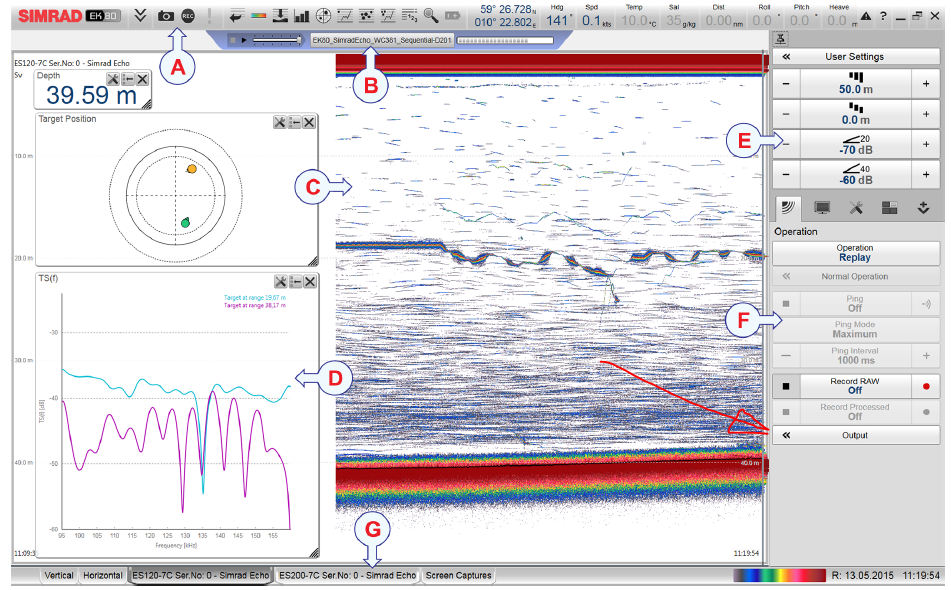
The main screen of the EK80 Software
Output Menu - Processed Data to Output screen
Output Menu - I/O setup screen
Output Menu - Relay Output screen
Expected output from monitoring Andes NAV primary port